- Untuk menyelesaikan tugas mikrokontroler yang diberikan oleh Bapak Dr. Darwison, M.T.
- Mengetahui komponen yang digunakan dalam membuat rangkaian pada modul 2.
Alat
a. Power Supply


b. Baterai
Spesifikasi dan Pinout Baterai- Input voltage: ac 100~240v / dc 10~30v
- Output voltage: dc 1~35v
- Max. Input current: dc 14a
- Charging current: 0.1~10a
- Discharging current: 0.1~1.0a
- Balance current: 1.5a/cell max
- Max. Discharging power: 15w
- Max. Charging power: ac 100w / dc 250w
- Jenis batre yg didukung: life, lilon, lipo 1~6s, lihv 1-6s, pb 1-12s, nimh, cd 1-16s
- Ukuran: 126x115x49mm
- Berat: 460gr

c. Voltmeter



- Input voltage: ac 100~240v / dc 10~30v
- Output voltage: dc 1~35v
- Max. Input current: dc 14a
- Charging current: 0.1~10a
- Discharging current: 0.1~1.0a
- Balance current: 1.5a/cell max
- Max. Discharging power: 15w
- Max. Charging power: ac 100w / dc 250w
- Jenis batre yg didukung: life, lilon, lipo 1~6s, lihv 1-6s, pb 1-12s, nimh, cd 1-16s
- Ukuran: 126x115x49mm
- Berat: 460gr


Bahan
a. Resistor

Spesifikasi :
.jpeg)
 |
.jpeg)
b. Arduino Uno R3

Spesifikasi:
c. Jumper.png) d. LCD
d. LCD
.png)
e. Motor DC L293D Driver f. Motor DC
f. Motor DC.png)
g. Dip Switch

h. Sensor LDR
Spesifikasi- Tegangan maksimum (DC): 150V- Konsumsi arus maksimum: 100mW- Tingkatan Resistansi/Tahanan : 10Ω sampai 4.100KΩ- Puncak spektral: 540nm (ukuran gelombang cahaya)- Waktu Respon Sensor : 20ms – 30ms Suhu operasi: -30° Celsius – 70° Celcius


.png)
.png)

.png)





a. Arduino Uno
Arduino merupakan sebuah perangkat elektronik yang bersifat open source dan sering digunakan untuk merancang dan membuat perangkat elektronik serta software yang mudah untuk digunakan. Arduino ini dirancang sedemikian rupa untuk mempermudah penggunaan perangkat elektronik di berbagai bidang.
Arduino ini memiliki beberapa komponen penting di dalamnya, seperti pin, mikrokontroler, dan konektor yang nanti akan dibahas lebih dalam selanjutnya. Selain itu, Arduino juga sudah menggunakan bahasa pemrograman Arduino Language yang sedikit mirip dengan bahasa pemrograman C++.
A. Bagian-bagian arduino uno:
1. Power USB
Digunakan untuk menghubungkan PapanArduino dengan komputer lewat koneksi USB
2. Power jack
Supply atau sumber listrik untuk Arduino dengan tipe Jack. Input DC 5 - 12 V.
3. Crystal Oscillator
Kristal ini digunakan sebagai layaknya detak jantung pada Arduino. Jumlah cetak menunjukkan 16000 atau 16000 kHz, atau 16 MHz.
4. Reset
Digunakan untuk mengulang program Arduino dari awal atau Reset.
5. Digital Pins I / O
Papan Arduino UNO memiliki 14 Digital Pin. Berfungsi untuk memberikan nilai logika ( 0 atau 1 ). Pin berlabel " ~ " adalah pin-pin PWM ( Pulse Width Modulation ) yang dapat digunakan untuk menghasilkan PWM.
6. Analog Pins
Papan Arduino UNO memiliki 6 pin analog A0 sampai A5. Digunakan untuk membaca sinyal atau sensor analog seperti sensor jarak, suhu dsb, dan mengubahnya menjadi nilai digital.
7. LED Power Indicator
Lampu ini akan menyala dan menandakan Papan Arduino mendapatkan supply listrik dengan baik.
Bagian-Bagian Pendukung
1. RAM
RAM (Random Access Memory) adalah tempat penyimpanan sementara pada komputer yang isinya dapat diakses dalam waktu yang tetap, tidak memperdulikan letak data tersebut dalam memori atau acak. Secara umum ada 2 jenis RAM yaitu SRAM (Static Random Acces Memory) dan DRAM (Dynamic Random Acces Memory).
2. ROM
ROM (Read-only Memory) adalah perangkat keras pada computer yang dapat menyimpan data secara permanen tanpa harus memperhatikan adanya sumber listrik. ROM terdiri dari Mask ROM, PROM, EPROM, EEPROM.
b. Resistor








- Kabel Jumper Male to Male

- Kabel Jumper Male to Female

Biasanya kabel ini digunakan untuk menghubungkan komponen elektronika selain arduino ke breadboard
- Kabel Jumper Female to Female


Simbol Motor DC

Gambar Simbol Motor DC
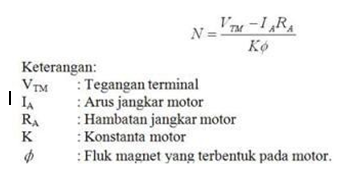
Motor DC tersusun dari dua bagian yaitu bagian diam (stator) dan bagian bergerak (rotor). Stator motor arus searah adalah badan motor atau kutub magnet (sikat-sikat), sedangkan yang termasuk rotor adalah jangkar lilitanya. Pada motor, kawat penghantar listrik yang bergerak tersebut pada dasarnya merupakan lilitan yang berbentuk persegi panjang yang disebut kumparan.

Gambar Prinsip Kerja Motor DC
Kumparan ABCD terletak dalam medan magnet serba sama dengan kedudukan sisi aktif AD dan CB yang terletak tepat lurus arah fluks magnet. Sedangkan sisi AB dan DC ditahan pada bagian tengahnya, sehingga apabila sisi AD dan CB berputar karena adanya gaya lorentz, maka kumparan ABCD akan berputar.
T = F.r
Dimana :
T = momen putar (Nm) F = gaya tolak (newton)
r = jarak sisi kumparan pada sumbu putar (meter)
Pada daerah dibawah kutub-kutub magnet besarnya momen putar tetap karena besarnya gaya lorentz. Hal ini berarti bahwa kedudukan garis netral sisi sisi kumparan akan berhenti berputar. Supaya motor dapat berputar terus dengan baik, maka perlu ditambah jumlah kumparan yang digunakan. Kumparan- kumparan harus diletakkan sedemikian rupa sehingga momen putar yang dialami setiap sisi kumparan akan saling membantu dan menghasilkan putaran yang baik. Dengan pertimbangan teknis, maka kumparan-kumparan yang berputar tersebut dililitkan pada suatu alat yang disebut jangkar, sehingga lilitan kumparan itupun disebut lilitan jangkar.

IC L293D adalah IC yang didesain khusus sebagai driver motor DC dan dapat dikendalikan dengan rangkaian TTL maupun mikrokontroler. Motor DC yang dikontrol dengan driver IC L293D dapat dihubungkan ke ground maupun ke sumber tegangan positif karena di dalam driver L293D sistem driver yang digunakan adalah totem pool. Dalam 1 unit chip IC L293D terdiri dari 4 buah driver motor DC yang berdiri sendiri sendiri dengan kemampuan mengalirkan arus 1 Ampere tiap drivernya. Sehingga dapat digunakan untuk membuat driver H-bridge untuk 2 buah motor DC. Konstruksi pin driver motor DC IC l293D adalah sebagai berikut.
Konstruksi Pin Driver Motor DC IC L293D

Fungsi Pin Driver Motor DC IC L293D
1. Pin EN (Enable, EN1.2, EN3.4) berfungsi untuk mengijinkan driver menerima perintah untuk menggerakan motor DC.
2. Pin In (Input, 1A, 2A, 3A, 4A) adalah pin input sinyal kendali motor DC 3. Pin Out (Output, 1Y, 2Y, 3Y, 4Y) adalah jalur output masing-masing driver yang dihubungkan ke motor DC 4. Pin VCC (VCC1, VCC2) adalah jalur input tegangan sumber driver motor DC, dimana VCC1 adalah jalur input sumber tegangan rangkaian kontrol dirver dan VCC2 adalah jalur input sumber tegangan untuk motor DC yang dikendalikan. 5. Pin GND (Ground) adalah jalu yang harus dihubungkan ke ground, pin GND ini ada 4 buah yang berdekatan dan dapat dihubungkan ke sebuah pendingin kecil.
Rangkaian Aplikasi Driver Motor DC IC L293D

Pada gambar driver IC L293D diatas adalah contoh aplikasi dari keempat unit driver motor DC yang dihubungkan secar berbeda sesuai dengan keinginan dan kebutuhan.
h. LCD
 Liquid Crystal Display (LCD) adalah sebuah peralatan elektronik yang berfungsi untukmenampilkan output sebuah sistem dengan cara membentuk suatu citra atau gambaran pada sebuah layar. Secara garis besar komponen penyusun LCD terdiri dari kristal cair (liquid crystal) yang diapit oleh 2 buah elektroda transparan dan 2 buah filter polarisasi (polarizing filter). Struktur LCD dapat dilihat pada gambar berikut.
Liquid Crystal Display (LCD) adalah sebuah peralatan elektronik yang berfungsi untukmenampilkan output sebuah sistem dengan cara membentuk suatu citra atau gambaran pada sebuah layar. Secara garis besar komponen penyusun LCD terdiri dari kristal cair (liquid crystal) yang diapit oleh 2 buah elektroda transparan dan 2 buah filter polarisasi (polarizing filter). Struktur LCD dapat dilihat pada gambar berikut. Gambar 14. Struktur LCD
Gambar 14. Struktur LCD
Keterangan:
1. Film dengan polarizing filter vertical untuk memolarisasi cahaya yang masuk.
2. Glass substrate yang berisi kolom-kolom elektroda Indium tin oxide (ITO).
3. Twisted nematic liquid crystal (kristal cair dengan susunan terpilin).
4. Glass substrate yang berisi baris-baris elektroda Indium tin oxide (ITO).
5. Film dengan polarizing filter horizontal untuk memolarisasi cahaya yang masuk.
6. Reflektor cahaya untuk memantulkan cahaya yang masuk LCD kembali ke mata pengamat.
Sebuah citra dibentuk dengan mengombinasikan kondisi nyala dan mati dari pixel-pixel yang menyusun layar sebuah LCD. Pada umumnya LCD yang dijual di pasaran sudah memiliki integrated circuit tersendiri sehingga para pemakai dapat mengontrol tampilan LCD dengan mudah dengan menggunakan mikrokontroler untuk mengirimkan data melalui pin-pin input yang sudah tersedia.Module circuit dari LCD dan kaki-kakinya dapat dilihat melalui gambar berikut.
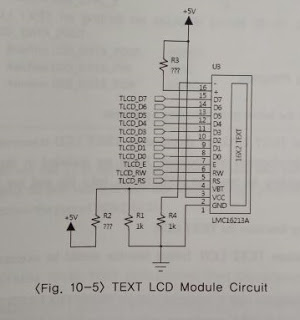 Gambar 15. TEXT LCD Module Circuit
Gambar 15. TEXT LCD Module Circuit

Gambar 16. Kaki-kaki yang Terdapat pada LCD
I. Sensor LDR

LDR (Light Dependent Resistor) merupakan salah satu komponen resistor yang nilai resistansinya akan berubah-ubah sesuai dengan intensitas cahaya yang mengenainya. LDR juga dapat digunakan sebagai sensor cahaya. Nilai resistansi dari LDR bergantung pada intensitas cahaya. Semakin tinggi intensitas cahaya (siang hari) yang mengenainya, maka semakin kecil nilai resistansinya. Sebaliknya semakin rendah intensitas cahaya (malam hari) yang mengenainya, maka semakin besar nilai resistansinya. Secara umum, sensor LDR memiliki nilai hambatan 200 Kilo Ohm saat intensitas cahaya rendah (malam hari) dan akan menurun menjadi 500 Ohm saat intensitas cahaya tinggi (siang hari).Umumnya sensor LDR digunakan pada rangkaian lampu otomatis pada rumah, taman, dan jalan raya.
Karakteristik sensor LDR- Laju RecoveryLaju recovery merupakan suatu ukuran praktis dan suatu kenaikan nilai resistansi dalam waktu tertentu. Harga ini ditulis dalam K/detik, untuk LDR tipe arus harganya lebih besar dari 200K/detik(selama 20 menit pertama mulai dari level cahaya 100 lux), kecepatan tersebut akan lebih tinggi pada arah sebaliknya, yaitu pindah dari tempat gelap ke tempat terang yang memerlukan waktu kurang dari 10 ms untuk mencapai resistansi yang sesuai den-gan level cahaya 400 lux.
- Respon SpektralSensor Cahaya LDR (Light Dependent Resistor) tidak mempunyai sensitivitas yang sama untuk setiap panjang gelombang cahaya yang jatuh padanya (yaitu warna). Bahan yang biasa digunakan sebagai penghantar arus listrik yaitu tembaga, aluminium, baja, emas dan perak. Dari kelima bahan tersebut tembaga merupakan penghantar yang paling banyak, digunakan karena mempunyai daya hantaryang baik.
Grafik respon sensor j. Baterai
j. Baterai  Baterai (Battery) adalah sebuah alat yang dapat merubah energi kimia yang disimpannya menjadi energi Listrik yang dapat digunakan oleh suatu perangkat Elektronik. Hampir semua perangkat elektronik yang portabel seperti Handphone, Laptop, Senter, ataupun Remote Control menggunakan Baterai sebagai sumber listriknya. Dengan adanya Baterai, kita tidak perlu menyambungkan kabel listrik untuk dapat mengaktifkan perangkat elektronik kita sehingga dapat dengan mudah dibawa kemana-mana. Dalam kehidupan kita sehari-hari, kita dapat menemui dua jenis Baterai yaitu Baterai yang hanya dapat dipakai sekali saja (Single Use) dan Baterai yang dapat di isi ulang (Rechargeable). Baterai simbol seperti gambar di bawah ini:
Baterai (Battery) adalah sebuah alat yang dapat merubah energi kimia yang disimpannya menjadi energi Listrik yang dapat digunakan oleh suatu perangkat Elektronik. Hampir semua perangkat elektronik yang portabel seperti Handphone, Laptop, Senter, ataupun Remote Control menggunakan Baterai sebagai sumber listriknya. Dengan adanya Baterai, kita tidak perlu menyambungkan kabel listrik untuk dapat mengaktifkan perangkat elektronik kita sehingga dapat dengan mudah dibawa kemana-mana. Dalam kehidupan kita sehari-hari, kita dapat menemui dua jenis Baterai yaitu Baterai yang hanya dapat dipakai sekali saja (Single Use) dan Baterai yang dapat di isi ulang (Rechargeable). Baterai simbol seperti gambar di bawah ini:
Gambar Simbol Baterai
1. Pin EN (Enable, EN1.2, EN3.4) berfungsi untuk mengijinkan driver menerima perintah untuk menggerakan motor DC.
Rangkaian Aplikasi Driver Motor DC IC L293D

Pada gambar driver IC L293D diatas adalah contoh aplikasi dari keempat unit driver motor DC yang dihubungkan secar berbeda sesuai dengan keinginan dan kebutuhan.

Keterangan:
1. Film dengan polarizing filter vertical untuk memolarisasi cahaya yang masuk.
2. Glass substrate yang berisi kolom-kolom elektroda Indium tin oxide (ITO).
3. Twisted nematic liquid crystal (kristal cair dengan susunan terpilin).
4. Glass substrate yang berisi baris-baris elektroda Indium tin oxide (ITO).
5. Film dengan polarizing filter horizontal untuk memolarisasi cahaya yang masuk.
6. Reflektor cahaya untuk memantulkan cahaya yang masuk LCD kembali ke mata pengamat.
Sebuah citra dibentuk dengan mengombinasikan kondisi nyala dan mati dari pixel-pixel yang menyusun layar sebuah LCD. Pada umumnya LCD yang dijual di pasaran sudah memiliki integrated circuit tersendiri sehingga para pemakai dapat mengontrol tampilan LCD dengan mudah dengan menggunakan mikrokontroler untuk mengirimkan data melalui pin-pin input yang sudah tersedia.





k. Voltmeter

Volt meter DC merupakan alat ukur yang berfungsi untuk mengetahui beda potensial tegangan DC antara 2 titik pada suatu beban listrik atau rangkaian elektronika.

- Beroperasi hingga 2,7 V, ideal dalam sistem tenaga baterai dengan tegangan 3 V
- Didesain dengan daya rendah
- Akurasi ditingkatkan
- Waktu respon yang cepat
- Stabil, dengan penyimpangan yang rendah
- Tahan dengan zat kimia
- Suhu Operasi -40°C- 85°C (-40°F-185°F)
- Histerisis ±2 RH(Relative Humidity)
- Suplai Arus 5µA
- Output sinyal Tegangan Analog
- Waktu Respon 5s (1/e dalam udara yang bergerak lambat)
Sensor sentuh pada dasarnya adalah saklar dengan berbagai macam variasi bentuknya, penggunaan sensor sentuh disini digunakan untuk menutup garasi.
4. Grafik Respon Sensor Sentuh Grafik respon:
Grafik respon:
.png)
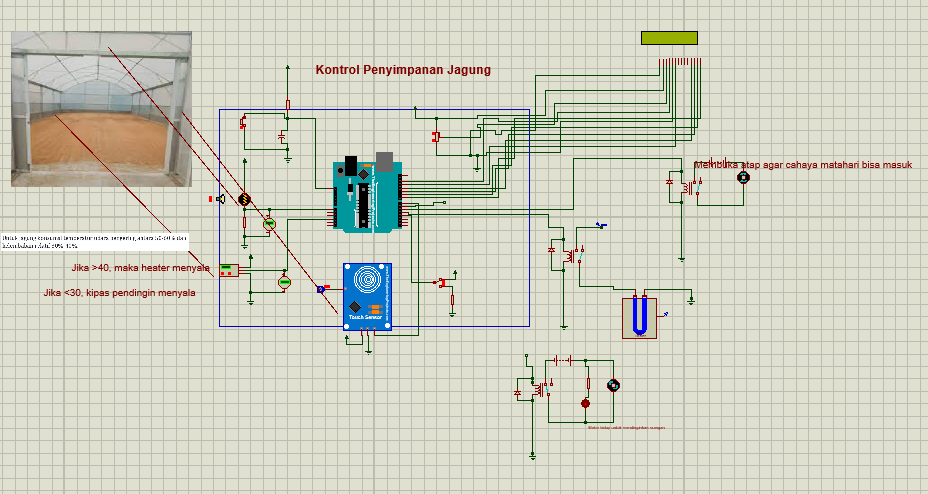
c. Rangkaian Simulasi dan Prinsip Kerja[Kembali]

- Listing Program
Berikut adalah penjelasan untuk setiap baris dalam kodingan yang diberikan:
#include <LiquidCrystal.h>: Mendeklarasikan penggunaan library LiquidCrystal untuk mengakses LCD.LiquidCrystal lcd(13, 12, 11, 10, 9, 8);: Membuat objek lcd yang diinisialisasi dengan pin untuk menghubungkan LCD ke Arduino.int sw1 = 2;,int sw2 = 3;, dst.: Mendeklarasikan variabel untuk menyimpan nilai dari saklar atau switch (sw) dan pin yang terhubung ke masing-masing switch.void setup() {: Memulai fungsi setup, yang akan dijalankan sekali pada awal eksekusi program.lcd.begin(16, 2);: Menginisialisasi LCD dengan ukuran 16 kolom dan 2 baris.pinMode(sw1, INPUT);,pinMode(sw2, INPUT);, dst.: Mengatur mode pin-pin switch sebagai input.int s1 = digitalRead(sw1);,int s2 = digitalRead(sw2);, dst.: Membaca nilai dari masing-masing switch dan menyimpannya dalam variabels1,s2, dst.int ldr = analogRead(A0);: Membaca nilai analog dari sensor LDR yang terhubung ke pin A0 dan menyimpannya dalam variabelldr.if(s1 == HIGH) {: Memulai blok kondisional, dimana jika switch 1 (s1) dalam keadaan HIGH (terhubung), maka blok perintah di dalamnya akan dijalankan.if(s2 == HIGH && ((s3 && s4) == LOW)) {: Blok kondisional di dalam blok kondisional sebelumnya. Jika s2 HIGH dan s3 serta s4 LOW, maka blok perintah di dalamnya dijalankan.lcd.clear();: Menghapus konten dari LCD.lcd.setCursor(0,0);,lcd.print(ldr);, dst.: Menetapkan kursor LCD dan menampilkan nilai LDR pada baris dan kolom tertentu.delay(200);: Memberi jeda 200 milidetik.} else if(s3 == HIGH && ((s2 && s4) == LOW)) {: Kondisi kedua jika kondisi pertama tidak terpenuhi.(dst.): Blok-blok kondisional berikutnya untuk kondisi-kondisi tertentu dengan perintah-perintah yang sesuai.
} else {: Blok ini akan dijalankan jika tidak ada kondisi yang terpenuhi pada blok-blok sebelumnya.lcd.clear();,lcd.setCursor(0,0);, dst.: Menampilkan pesan "Nice Try" dan "No Condition" pada LCD.delay(200);: Memberi jeda 200 milidetik.} else {: Blok ini akan dijalankan jika s1 dalam keadaan LOW (tidak terhubung).(dst.): Menampilkan pesan "ELECTRONIC" dan "&INSTRUMENTATION" pada LCD.
delay(100);: Memberi jeda 100 milidetik.}: Penutup blok loop.
Dengan demikian, kodingan ini berfungsi untuk membaca nilai dari beberapa switch dan sensor LDR, serta menampilkan pesan-pesan tertentu pada LCD sesuai dengan kondisi yang terpenuhi.
e. Download File[Kembali]
- Download HMTL klik di sini
- Download kodingan arduino klik di sini
- Download Simulasi Rangkaian klik di sini
- Download Video Membuat Rangkaian klik di sini
- Download Video Prinsip Kerja Rangkaian klik di sini
- Download Datasheet Switch klik disini
- Download Datasheet LED klik disini
- Download Datasheet Switch klik disini
- Download Data Sheet Resistor klik disini
- Download Data sheet LM35 Klik di sini
- Download Data Sheet LCD klik di sini
- Download Data Sheet Dioda 1N4001 klik disini
- Download Data Sheet Transistor NPN BC547 klik disini
- Download Data Sheet Relay klik disini
- Download Data Sheet Motor DC klik disini
- Download Data sheet Touch Sensor klik disini
- Download File Library Touch Sensor klik disini
- Download Datasheet HIH-5030 klik di sini


{kind=link}
Tidak ada komentar: