- Untuk menyelesaikan tugas mikrokontroler yang diberikan oleh Bapak Dr. Darwison, M.T.
- Mengetahui komponen yang digunakan dalam membuat rangkaian pada Tugas Besar (Aplikasi Smart Toiletroom).
Alat
a. Power Supply


b. Voltmeter DC

c. Baterai
Spesifikasi dan Pinout Baterai- Input voltage: ac 100~240v / dc 10~30v
- Output voltage: dc 1~35v
- Max. Input current: dc 14a
- Charging current: 0.1~10a
- Discharging current: 0.1~1.0a
- Balance current: 1.5a/cell max
- Max. Discharging power: 15w
- Max. Charging power: ac 100w / dc 250w
- Jenis batre yg didukung: life, lilon, lipo 1~6s, lihv 1-6s, pb 1-12s, nimh, cd 1-16s
- Ukuran: 126x115x49mm
- Berat: 460gr



b. Voltmeter DC


- Input voltage: ac 100~240v / dc 10~30v
- Output voltage: dc 1~35v
- Max. Input current: dc 14a
- Charging current: 0.1~10a
- Discharging current: 0.1~1.0a
- Balance current: 1.5a/cell max
- Max. Discharging power: 15w
- Max. Charging power: ac 100w / dc 250w
- Jenis batre yg didukung: life, lilon, lipo 1~6s, lihv 1-6s, pb 1-12s, nimh, cd 1-16s
- Ukuran: 126x115x49mm
- Berat: 460gr

Bahan
a. Resistor

Spesifikasi :
.jpeg)
 |
.jpeg)
b. LED

Spesifikasi :
* Superior weather resistance
* 5mm Round Standard Directivity
* UV Resistant Eproxy
* Forward Current (IF): 30mA
* Forward Voltage (VF): 1.8V to 2.4V
* Reverse Voltage: 5V
* Operating Temperature: -30℃ to +85℃
* Storage Temperature: -40℃ to +100℃
* Luminous Intensity: 20mcd
Tegangan LED menurut warna yang dihasilkan:
- Infra merah : 1,6 V.
- Merah : 1,8 V – 2,1 V.
- Oranye : 2,2 V.
- Kuning : 2,4 V.
- Hijau : 2,6 V.
- Biru : 3,0 V – 3,5 V.
- Putih : 3,0 – 3,6 V.
- Ultraviolet : 3,5 V.

Spesifikasi :
* Superior weather resistance
* 5mm Round Standard Directivity
* UV Resistant Eproxy
* Forward Current (IF): 30mA
* Forward Voltage (VF): 1.8V to 2.4V
* Reverse Voltage: 5V
* Operating Temperature: -30℃ to +85℃
* Storage Temperature: -40℃ to +100℃
* Luminous Intensity: 20mcd
Tegangan LED menurut warna yang dihasilkan:
- Infra merah : 1,6 V.
- Merah : 1,8 V – 2,1 V.
- Oranye : 2,2 V.
- Kuning : 2,4 V.
- Hijau : 2,6 V.
- Biru : 3,0 V – 3,5 V.
- Putih : 3,0 – 3,6 V.
- Ultraviolet : 3,5 V.
c. Arduino Uno R3

Spesifikasi:
d. Jumper.png)
e. Sensor PIR
Spesifikasi :
f. Infrared Sensor

Spesifikasi5VDC Operating voltage
I/O pins are 5V and 3.3V compliant
Range: Up to 20cm
Adjustable Sensing range
Built-in Ambient Light Sensor
20mA supply current
Mounting hole
Size: 50 x 20 x 10 mm (L x B x H)
Hole size: φ2.5mm
g. Sensor suhu (LM35)
Spesifikasi• Short Circuit Protected Outputs • True Differential Input Stage • Single Supply Operation: 3.0 V to 32 V • Low Input Bias Currents • Internally Compensated • Common Mode Range Extends to Negative Supply • Single and Split Supply Operation • ESD Clamps on the Inputs Increase Ruggedness of the Device without Affecting Operation • NCV Prefix for Automotive and Other Applications Requiring Unique Site and Control Change Requirements; AEC−Q100 Qualified and PPAP Capable • These Devices are Pb−Free, Halogen Free/BFR Free and are RoHS Compliant
h. Sensor Jarak (GP2D12)

Spesifikasi :
• Analog output• Effective Range: 10 to 80 cm• LED pulse cycle duration: 32 ms• Typical response time: 39 ms• Typical start up delay: 44 ms• Average current consumption: 33 mA• Detection area diameter @ 80 cm: 6 cm
i. Relay


.png)

Spesifikasi :
5VDC Operating voltage
I/O pins are 5V and 3.3V compliant
Range: Up to 20cm
Adjustable Sensing range
Built-in Ambient Light Sensor
20mA supply current
Mounting hole
Size: 50 x 20 x 10 mm (L x B x H)
Hole size: φ2.5mm

Spesifikasi :

- Trigger Voltage (Voltage across coil) : 12V DC
- Trigger Current (Nominal current) : 70mA
- Maximum AC load current: 10A @ 250/125V AC
- Maximum DC load current: 10A @ 30/28V DC
- Compact 5-pin configuration with plastic moulding
- Operating time: 10msec Release time: 5msec
- Maximum switching: 300 operating/minute (mechanically)
j. Motor DC

DC Motor Specifications
- Standard 130 Type DC motor
- Operating Voltage: 4.5V to 9V
- Recommended/Rated Voltage: 6V
- Current at No load: 70mA (max)
- No-load Speed: 9000 rpm
- Loaded current: 250mA (approx)
- Rated Load: 10g*cm
- Motor Size: 27.5mm x 20mm x 15mm
- Weight: 17 grams

- Package Type: Available in DO-41 & SMD Packages
- Diode Type: Silicon Rectifier General Usage Diode
- Max Repetitive Reverse Voltage is: 1000 Volts
- Average Fwd Current: 1000mA
- Non-repetitive Max Fwd Current: 30A
- Max Power Dissipation is: 3W
- Max Storage & Operating temperature Should Be: -55 to +175 Centigrade
.png)
m. Touch Sensor


- Operating Voltage is +5V
- Torque: 2.5kg/cm
- Operating speed is 0.1s/60°
- Gear Type: Plastic
- Rotation : 0°-180°
- Weight of motor : 9gm
- Package includes gear horns and screws
o. LCD 20X4
.jpg)

a. Arduino Uno
b. Resistor







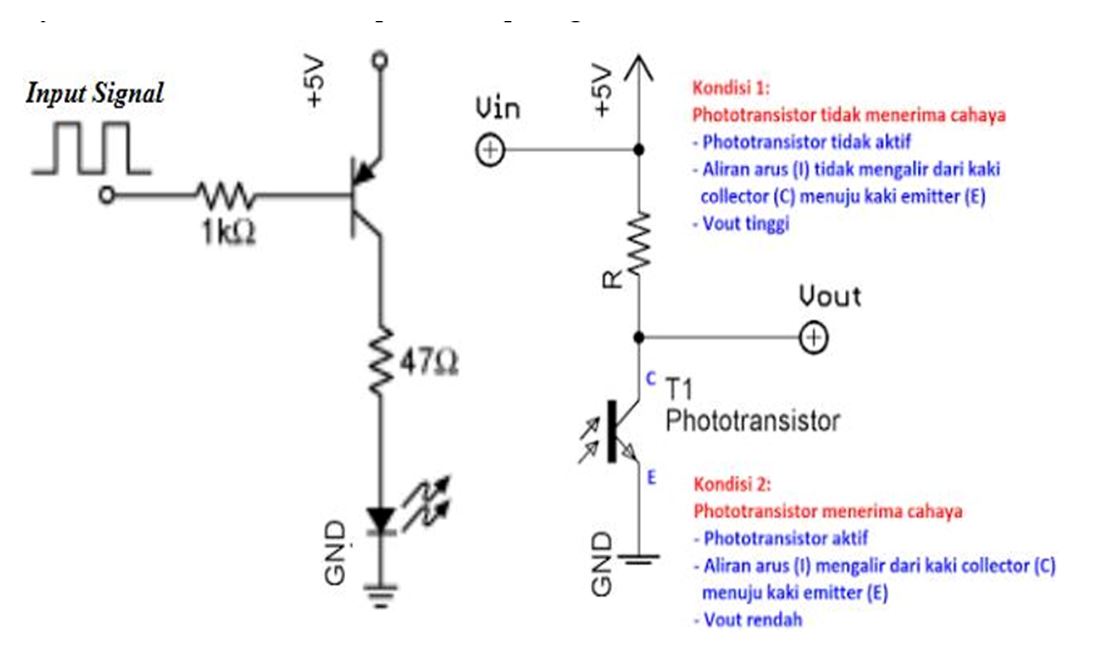

Grafik menunjukkan hubungan antara resistansi dan jarak potensial untuk sensitivitas rentang antara pemancar dan penerima inframerah. Resistor yang digunakan pada sensor mempengaruhi intensitas cahaya inframerah keluar dari pemancar. Semakin tinggi resistansi yang digunakan, semakin pendek jarak IR Receiver yang mampu mendeteksi sinar IR yang dipancarkan dari IR Transmitter karena intensitas cahaya yang lebih rendah dari IR Transmitter. Sementara semakin rendah resistansi yang digunakan, semakin jauh jarak IR Receiver mampu mendeteksi sinar IR yang dipancarkan dari IR Transmitter karena intensitas cahaya yang lebih tinggi dari IR Transmitter.

Tegangan LED menurut warna yang dihasilkan:
- Infra merah : 1,6 V.
- Merah : 1,8 V – 2,1 V.
- Oranye : 2,2 V.
- Kuning : 2,4 V.
- Hijau : 2,6 V.
- Biru : 3,0 V – 3,5 V.
- Putih : 3,0 – 3,6 V.
- Ultraviolet : 3,5 V.

Sensor GP2D12 adalah sensor jarak analog yang menggunakan infrared untuk mendeteksi jarak antara 10 cm sampai 80 cm. GP2D12 mengeluarkan output voltase non linear dalam hubungannya dalam jarak objek dari sensor dan menggunakan interface analog to digital converter (ADC) Spesifikasi Teknis:
.a. Range 10 – 80 cm
b. Update frequency/ period 25 Hz / 40ms
c. power supply voltage 4.5 – 5.5 V
d. Noise on analog output < 200mV
e. Mean consumtion 35 mA
Kelemahan:
a. Respon 40ms
b. Error bila jarak <10cm dan pada cermin
c. Hanya dapat mengukur <80 cm
Kelebiahan:
a. Dapat mengukur jarak pada bidang miring
b. Sudut pengukuran sempit
c. Sangat direktif
Berikut Grafik respon anatara jarak dan deteksi objek terhadap output analog sensor

Sensor GP2D12 adalah sensor jarak analog yang menggunakan infrared untuk mendeteksi jarak antara 10 cm sampai 80 cm. GP2D12 mengeluarkan output voltase non linear dalam hubungannya dalam jarak objek dari sensor dan menggunakan interface analog to digital converter (ADC) Spesifikasi Teknis:
.a. Range 10 – 80 cm
b. Update frequency/ period 25 Hz / 40ms
c. power supply voltage 4.5 – 5.5 V
d. Noise on analog output < 200mV
e. Mean consumtion 35 mA
Kelemahan:
a. Respon 40ms
b. Error bila jarak <10cm dan pada cermin
c. Hanya dapat mengukur <80 cm
Kelebiahan:
a. Dapat mengukur jarak pada bidang miring
b. Sudut pengukuran sempit
c. Sangat direktif
Berikut Grafik respon anatara jarak dan deteksi objek terhadap output analog sensor


PIR (Passive Infrared Receiver) merupakan sebuah sensor berbasiskan infrared. Akan tetapi, tidak seperti sensor infrared kebanyakan yang terdiri dari IR LED dan fototransistor. PIR tidak memancarkan apapun seperti IR LED. Sesuai dengan namanya ‘Passive’, sensor ini hanya merespon energi dari pancaran sinar inframerah pasif yang dimiliki oleh setiap benda yang terdeteksi olehnya. Benda yang bisa dideteksi oleh sensor ini biasanya adalah tubuh manusia
Diagram sebsor PIR:

PIR (Passive Infrared Receiver) merupakan sebuah sensor berbasiskan infrared. Akan tetapi, tidak seperti sensor infrared kebanyakan yang terdiri dari IR LED dan fototransistor. PIR tidak memancarkan apapun seperti IR LED. Sesuai dengan namanya ‘Passive’, sensor ini hanya merespon energi dari pancaran sinar inframerah pasif yang dimiliki oleh setiap benda yang terdeteksi olehnya. Benda yang bisa dideteksi oleh sensor ini biasanya adalah tubuh manusia.
Sensor PIR ini bekerja dengan menangkap energi panas yang dihasilkan dari pancaran sinar inframerah pasif yang dimiliki setiap benda dengan suhu benda diatas nol mutlak. Seperti tubuh manusia yang memiliki suhu tubuh kira-kira 32 derajat celcius, yang merupakan suhu panas yang khas yang terdapat pada lingkungan. Pancaran sinar inframerah inilah yang kemudian ditangkap oleh Pyroelectric sensor yang merupakan inti dari sensor PIR ini sehingga menyebabkan Pyroelectic sensor yang terdiri dari galium nitrida, caesium nitrat dan litium tantalate menghasilkan arus listrik. Mengapa bisa menghasilkan arus listrik? Karena pancaran sinar inframerah pasif ini membawa energi panas. Prosesnya hampir sama seperti arus listrik yangterbentuk ketika sinar matahari mengenai solar cell.
Grafik Respon Pir terhadap suhu

Grafik sensor pir terhadap jarak, kecepatan,arah objek


Grafik LM35


Relay adalah Saklar (Switch) yang dioperasikan secara listrik dan merupakan komponen Electromechanical (Elektromekanikal) yang terdiri dari 2 bagian utama yakni Elektromagnet (Coil) dan Mekanikal (seperangkat Kontak Saklar/Switch). Relay menggunakan Prinsip Elektromagnetik untuk menggerakkan Kontak Saklar sehingga dengan arus listrik yang kecil (low power) dapat menghantarkan listrik yang bertegangan lebih tinggi. Sebagai contoh, dengan Relay yang menggunakan Elektromagnet 5V dan 50 mA mampu menggerakan Armature Relay (yang berfungsi sebagai saklarnya) untuk menghantarkan listrik 220V 2A.

Ada besi atau yang disebut dengan nama inti besi dililit oleh sebuah kumparan yang berfungsi sebagai pengendali. Sehingga kumparan kumparan yang diberikan arus listrik maka akan menghasilkan gaya elektromagnet. Gaya tersebut selanjutnya akan menarik angker untuk pindah dari biasanya tutup ke buka normal. Dengan demikian saklar menjadi pada posisi baru yang biasanya terbuka yang dapat menghantarkan arus listrik. Ketika armature sudah tidak dialiri arus listrik lagi maka ia akan kembali pada posisi awal, yaitu normal close.
Fitur:
1. Tegangan pemicu (tegangan kumparan) 5V
2. Arus pemicu 70mA
3. Beban maksimum AC 10A @ 250 / 125V
4. Maksimum baban DC 10A @ 30 / 28V
5. Switching maksimum
k. Motor DC

Terdapat dua bagian utama pada sebuah Motor Listrik DC, yaitu Stator dan Rotor. Stator adalah bagian motor yang tidak berputar, bagian yang statis ini terdiri dari rangka dan kumparan medan. Sedangkan Rotor adalah bagian yang berputar, bagian Rotor ini terdiri dari kumparan Jangkar. Dua bagian utama ini dapat dibagi lagi menjadi beberapa komponen penting yaitu diantaranya adalah Yoke (kerangka magnet), Poles (kutub motor), Field winding (kumparan medan magnet), ArmatureWinding (Kumparan Jangkar), Commutator (Komutator)dan Brushes (kuas/sikat arang).
Pada prinsipnya motor listrik DC menggunakan fenomena elektromagnet untuk bergerak, ketika arus listrik diberikan ke kumparan, permukaan kumparan yang bersifat utara akan bergerak menghadap ke magnet yang berkutub selatan dan kumparan yang bersifat selatan akan bergerak menghadap ke utara magnet. Saat ini, karena kutub utara kumparan bertemu dengan kutub selatan magnet ataupun kutub selatan kumparan bertemu dengan kutub utara magnet maka akan terjadi saling tarik menarik yang menyebabkan pergerakan kumparan berhenti

Untuk menggerakannya lagi, tepat pada saat kutub kumparan berhadapan dengan kutub magnet, arah arus pada kumparan dibalik. Dengan demikian, kutub utara kumparan akan berubah menjadi kutub selatan dan kutub selatannya akan berubah menjadi kutub utara. Pada saat perubahan kutub tersebut terjadi, kutub selatan kumparan akan berhadap dengan kutub selatan magnet dan kutub utara kumparan akan berhadapan dengan kutub utara magnet. Karena kutubnya sama, maka akan terjadi tolak menolak sehingga kumparan bergerak memutar hingga utara kumparan berhadapan dengan selatan magnet dan selatan kumparan berhadapan dengan utara magnet. Pada saat ini, arus yang mengalir ke kumparan dibalik lagi dan kumparan akan berputar lagi karena adanya perubahan kutub. Siklus ini akan berulang-ulang hingga arus listrik pada kumparan diputuskan.
l. Lampu
Light Emitting Diode atau sering disingkat dengan LED adalah komponen elektronika yang dapat memancarkan cahaya monokromatik ketika diberikan tegangan maju. LED merupakan keluarga Dioda yang terbuat dari bahan semikonduktor.
m. Dioda
Dioda adalah komponen elektronika yang terdiri dari dua kutub dan berfungsi menyearahkan arus. Komponen ini terdiri dari penggabungan dua semikonduktor yang masing-masing diberi doping (penambahan material) yang berbeda, dan tambahan material konduktor untuk mengalirkan listrik.Dioda memiliki simbol sebagai berikut : Gambar Simbol Dioda
Gambar Simbol Dioda
Light Emitting Diode atau sering disingkat dengan LED adalah komponen elektronika yang dapat memancarkan cahaya monokromatik ketika diberikan tegangan maju. LED merupakan keluarga Dioda yang terbuat dari bahan semikonduktor.
m. Dioda

Cara Kerja Dioda
Secara sederhana, cara kerja dioda dapat dijelaskan dalam tiga kondisi, yaitu kondisi tanpa tegangan (unbiased), diberikan tegangan positif (forward biased), dan tegangan negatif (reverse biased).
Secara sederhana, cara kerja dioda dapat dijelaskan dalam tiga kondisi, yaitu kondisi tanpa tegangan (unbiased), diberikan tegangan positif (forward biased), dan tegangan negatif (reverse biased).
A. Kondisi tanpa tegangan
Pada kondisi tidak diberikan tegangan akan terbentuk suatu perbatasan medan listrik pada daerah P-N junction. Hal ini terjadi diawali dengan proses difusi, yaitu bergeraknya muatan elektro dari sisi n ke sisi p. Elektron-elektron tersebut akan menempati suatu tempat di sisi p yang disebut dengan holes. Pergerakan elektron-elektron tersebut akan meninggalkan ion positif di sisi n, dan holes yang terisi dengan elektron akan menimbulkan ion negatif di sisi p. Ion-ion tidak bergerak ini akan membentuk medan listrik statis yang menjadi penghalang pergerakan elektron pada dioda.
Pada kondisi tidak diberikan tegangan akan terbentuk suatu perbatasan medan listrik pada daerah P-N junction. Hal ini terjadi diawali dengan proses difusi, yaitu bergeraknya muatan elektro dari sisi n ke sisi p. Elektron-elektron tersebut akan menempati suatu tempat di sisi p yang disebut dengan holes. Pergerakan elektron-elektron tersebut akan meninggalkan ion positif di sisi n, dan holes yang terisi dengan elektron akan menimbulkan ion negatif di sisi p. Ion-ion tidak bergerak ini akan membentuk medan listrik statis yang menjadi penghalang pergerakan elektron pada dioda.
B. Kondisi tegangan positif (Forward-bias)
Pada kondisi ini, bagian anoda disambungkan dengan terminal positif sumber listrik dan bagian katoda disambungkan dengan terminal negatif. Adanya tegangan eksternal akan mengakibatkan ion-ion yang menjadi penghalang aliran listrik menjadi tertarik ke masing-masing kutub. Ion-ion negatif akan tertarik ke sisi anoda yang positif, dan ion-ion positif akan tertarik ke sisi katoda yang negatif. Hilangnya penghalang-penghalang tersebut akan memungkinkan pergerakan elektron di dalam dioda, sehingga arus listrik dapat mengalir seperti pada rangkaian tertutup.
Pada kondisi ini, bagian anoda disambungkan dengan terminal positif sumber listrik dan bagian katoda disambungkan dengan terminal negatif. Adanya tegangan eksternal akan mengakibatkan ion-ion yang menjadi penghalang aliran listrik menjadi tertarik ke masing-masing kutub. Ion-ion negatif akan tertarik ke sisi anoda yang positif, dan ion-ion positif akan tertarik ke sisi katoda yang negatif. Hilangnya penghalang-penghalang tersebut akan memungkinkan pergerakan elektron di dalam dioda, sehingga arus listrik dapat mengalir seperti pada rangkaian tertutup.
C. Kondisi tegangan negatif (Reverse-bias)
Pada kondisi ini, bagian anoda disambungkan dengan terminal negatif sumber listrik dan bagian katoda disambungkan dengan terminal positif. Adanya tegangan eksternal akan mengakibatkan ion-ion yang menjadi penghalang aliran listrik menjadi tertarik ke masing-masing kutub. Pemberian tegangan negatif akan membuat ion-ion negatif tertarik ke sisi katoda (n-type) yang diberi tegangan positif, dan ion-ion positif tertarik ke sisi anoda (p-type) yang diberi tegangan negatif. Pergerakan ion-ion tersebut searah dengan medan listrik statis yang menghalangi pergerakan elektron, sehingga penghalang tersebut akan semakin tebal oleh ion-ion. Akibatnya, listrik tidak dapat mengalir melalui dioda dan rangkaian diibaratkan menjadi rangkaian terbuka.
Pada kondisi ini, bagian anoda disambungkan dengan terminal negatif sumber listrik dan bagian katoda disambungkan dengan terminal positif. Adanya tegangan eksternal akan mengakibatkan ion-ion yang menjadi penghalang aliran listrik menjadi tertarik ke masing-masing kutub. Pemberian tegangan negatif akan membuat ion-ion negatif tertarik ke sisi katoda (n-type) yang diberi tegangan positif, dan ion-ion positif tertarik ke sisi anoda (p-type) yang diberi tegangan negatif. Pergerakan ion-ion tersebut searah dengan medan listrik statis yang menghalangi pergerakan elektron, sehingga penghalang tersebut akan semakin tebal oleh ion-ion. Akibatnya, listrik tidak dapat mengalir melalui dioda dan rangkaian diibaratkan menjadi rangkaian terbuka.
D. Rumus


Volt meter DC merupakan alat ukur yang berfungsi untuk mengetahui beda potensial tegangan DC antara 2 titik pada suatu beban listrik atau rangkaian elektronika.



p. Touch Sensor
sensor sentuh pada dasarnya adalah saklar limit switch dan microswitch( saklar spdt) dengan berbagai macam bentuk variasinya, sensor sentuh biasanya digunakan yaitu transistor pulp up bersifat active low yang berarti rangkaian mengeluarkan sinyal 1 kecuali saklar aktif, saklar down yaitu bersifat kebalikan dari saklar pulp up yaitu bersifat active low yaitu rangkaian mengeluarkan sinyal 0 kecuali saat saklar aktif, nilai resistor pada pulp down bekisar antara 1-10kq
Grafik Respon Sensor Sentuh Grafik respon:
Grafik respon:
q. Motor ServoMotor Servo adalah motor listrik yang dirancang menggunakan sistem umpan balik tertutup (closed loop). Sistem tertutup pada Servo menghasilkan umpan balik (feedback) yang mempengaruhi input dan mengendalikan perangkat. Dalam hal ini bertujuan untuk mengontrol kecepatan, akselerasi dan posisi sudut putaran motor tersebut. Motor servo pada dasarnya terdiri dari motor DC, rangkaian gearbox, rangkaian kontrol dan potensiometer. Bagian-bagiannya dengan jelas dapat dilihat pada gambar dibawah ini :

Bagian Motor Servo
Rangkaian gear terhubung pada as motor DC yang memiliki RPM yang tinggi. Gear ini akan meningkatkan torsi motor dengan konsekuensi turunnya RPM atau kecepatannya.
Potensiometer juga terhubung dengan gearbox. Putaran gearbox mempengaruhi resistansi pada potensiometer. Potensiometer ini dirangkai layaknya sebuah pembagi tegangan, sehingga ketika motor berputar, potensiometer akan menghasilkan output berupa tegangan pada level tertentu. Tegangan inilah yang menjadi informasi sudut putaran motor.
Untuk tetap mempertahankan posisinya, Rangkaian kontrol memerlukan sinyal PWM (Pulse Width Modulation ). Lebar sinyal ini diatur diantara 1ms hingga 2ms (milidetik). Motor akan berputar dari titik 0° hingga maksimal (180° atau 360°, tergantung tipenya) jika diberikan sinyal pada rentang waktu tersebut. Sinyal PWM ini harus terus diberikan setiap 20ms.
Perhatikan gambar dibawah ini. Pada lebar pulsa 1ms, motor akan tetap pada posisi 0°. Saat lebar pulsa diubah menjadi 1,5ms motor akan berputar 90°, dan apabila diberi sinyal 2ms maka putarannya menjadi 180°.

Apabila motor diberi beban yang dapat mengubah posisi sudut putaran, sistem umpan balik ini akan memberikan informasi sehingga motor DC tetap pada posisinya.
r. LCD 20X4
.jpg)
LCD (Liquid Crystal Display) adalah suatu jenis media tampil yang menggunakan kristal cair sebagai penampil utama. Adapun fitur yang disajikan dalam LCD ini adalah terdiri dari 16 karakter dan 2 baris, mempunyai 192 karakter tersimpan, terdapat karakter generator terprogram, dapat dialamati dengan mode 4 bit dan 8 bit, dilengkapi dengan back light.
Proses inisialisasi pin arduino yang terhubung ke pin LCD RS, Enable, D4, D5, D6, dan D7, dilakukan dalam baris LiquidCrystal (2, 3, 4, 5, 6, 7), dimana LCD merupakan variabel yang dipanggil setiap kali intruksi terkait LCD akan digunakan.
Pada Proyek Akhir ini LCD dapat menampilkan karakternya dengan menggunakan library yang bernama LiquidCrystal. Berikut ada beberapa fungsifungsi dari library LCD: - begin() Untuk begin() digunakan dalam inisialisasi interface ke LCD dan mendefinisikan ukuran kolom dan baris LCD. Pemanggilan begin() harus dilakukan terlebih dahulu sebelum memanggil instruksi lain dalam library LCD. Untuk syntax penulisan instruksi begin() ialah sebagai berikut. lcd.begin(cols,rows) dengan lcd ialah nama variable, cols jumlah kolom LCD, dan rows jumlah baris LCD.
- clear() Instruksi clear() digunakan untuk membersihkan pesan text. Sehingga tidak ada tulisan yang ditapilkan pada LCD.
- setCursor() 19 Instruksi ini digunakan untuk memposisikan cursor awal pesan text di LCD. Penulisan syntax setCursor() ialah sebagai berikut. lcd.setCursor(col,row) dengan lcd ialah nama variable, col kolom LCD, dan row baris LCD.
- print() Sesuai dengan namanya, instruksi print() ini digunakan untuk mencetak, menampilkan pesan text di LCD. Penulisan syntax print() ialah sebagai berikut.lcd.print(data) dengan lcd ialah nama variable, data ialah pesan yang ingin ditampilkan.
s. Sensor MQ135
Sensor MQ135 adalah transducer utama
yang digunakan dalam rangkaian ini, yang merupakan sebuah
sensor kimia atau gas sensor. Sensor ini mempunyai nilai
resistansi Rs yang akan berubah bila terkena gas dan juga
mempunyai sebuah pemanas (heater) digunakan untuk
membersihkan ruangan sensor dari kontaminasi udara luar.
Sensor kualitas udara MQ-135 adalah sensor yang
memonitor kualitas udara untuk mendeteksi gas amonia
(NH3), natrium-(di)oksida (NO2), alkohol/ethanol (C2H5OH),
benzena(C6H6), karbon dioksida (CO2), gas
belerang/sulfurhidroksida (H2S) dan asap/gas-gas lainnya di
udara. Sensor ini melaporkan hasil deteksi kualitas udara
berupa perubahan nilai resistensi analog di pin keluarannya.
Pin keluaran ini bisa disambungkan dengan pin ADC (analogto-digital converter) pada mikrokontroler/pin analog-input
Arduino dengan menambahkan satu buah resistor saja
(berfungsi sebagai pembagi tegangan/voltagedivider). Analog
To Digital Converter (ADC) adalah perangkat elektronika
yang berfungsi untuk mengubah sinyal analog (sinyal
kontinyu) menjadi sinyal digital. Perangkat ADC dapat
berbentuk suatu modul atau rangkaian elektronika maupun
suatu chip IC. ADC berfungsi sebagai jembatan pemrosesan
sinyal analog oleh sistem digital.
Grafik respon sensor MQ135

Motor Servo adalah motor listrik yang dirancang menggunakan sistem umpan balik tertutup (closed loop). Sistem tertutup pada Servo menghasilkan umpan balik (feedback) yang mempengaruhi input dan mengendalikan perangkat. Dalam hal ini bertujuan untuk mengontrol kecepatan, akselerasi dan posisi sudut putaran motor tersebut. Motor servo pada dasarnya terdiri dari motor DC, rangkaian gearbox, rangkaian kontrol dan potensiometer. Bagian-bagiannya dengan jelas dapat dilihat pada gambar dibawah ini :
 |
| Bagian Motor Servo |
Rangkaian gear terhubung pada as motor DC yang memiliki RPM yang tinggi. Gear ini akan meningkatkan torsi motor dengan konsekuensi turunnya RPM atau kecepatannya.
Potensiometer juga terhubung dengan gearbox. Putaran gearbox mempengaruhi resistansi pada potensiometer. Potensiometer ini dirangkai layaknya sebuah pembagi tegangan, sehingga ketika motor berputar, potensiometer akan menghasilkan output berupa tegangan pada level tertentu. Tegangan inilah yang menjadi informasi sudut putaran motor.
Untuk tetap mempertahankan posisinya, Rangkaian kontrol memerlukan sinyal PWM (Pulse Width Modulation ). Lebar sinyal ini diatur diantara 1ms hingga 2ms (milidetik). Motor akan berputar dari titik 0° hingga maksimal (180° atau 360°, tergantung tipenya) jika diberikan sinyal pada rentang waktu tersebut. Sinyal PWM ini harus terus diberikan setiap 20ms.
Perhatikan gambar dibawah ini. Pada lebar pulsa 1ms, motor akan tetap pada posisi 0°. Saat lebar pulsa diubah menjadi 1,5ms motor akan berputar 90°, dan apabila diberi sinyal 2ms maka putarannya menjadi 180°.

Apabila motor diberi beban yang dapat mengubah posisi sudut putaran, sistem umpan balik ini akan memberikan informasi sehingga motor DC tetap pada posisinya.
r. LCD 20X4
- begin() Untuk begin() digunakan dalam inisialisasi interface ke LCD dan mendefinisikan ukuran kolom dan baris LCD. Pemanggilan begin() harus dilakukan terlebih dahulu sebelum memanggil instruksi lain dalam library LCD. Untuk syntax penulisan instruksi begin() ialah sebagai berikut. lcd.begin(cols,rows) dengan lcd ialah nama variable, cols jumlah kolom LCD, dan rows jumlah baris LCD.
- clear() Instruksi clear() digunakan untuk membersihkan pesan text. Sehingga tidak ada tulisan yang ditapilkan pada LCD.
- setCursor() 19 Instruksi ini digunakan untuk memposisikan cursor awal pesan text di LCD. Penulisan syntax setCursor() ialah sebagai berikut. lcd.setCursor(col,row) dengan lcd ialah nama variable, col kolom LCD, dan row baris LCD.
- print() Sesuai dengan namanya, instruksi print() ini digunakan untuk mencetak, menampilkan pesan text di LCD. Penulisan syntax print() ialah sebagai berikut.lcd.print(data) dengan lcd ialah nama variable, data ialah pesan yang ingin ditampilkan.


.png)
c. Rangkaian Simulasi dan Prinsip Kerja[Kembali]

- Flowchart


- Listing Program
Include Libraries:
#include <Wire.h>: Mengimpor library untuk komunikasi I2C.#include <LiquidCrystal_I2C.h>: Mengimpor library untuk menggunakan tampilan LCD berbasis I2C.#include <Servo.h>: Library ini memungkinkan pengendalian servo motor.
Servo Objects dan Penetapan Pin:
Servo myServo1;,Servo myServo2;,Servo myServo3;: Deklarasi tiga objek Servo.int sPIR = 10;,int sInfra = 11;,int sTouch = 12;: Penetapan pin untuk berbagai sensor (PIR sensor, Infrared sensor, Touch sensor).int oMotor = 4;,int oLamp = 8;: Penetapan pin untuk perangkat keluaran (Motor dan Lampu).
Inisialisasi LCD:
LiquidCrystal_I2C lcd(0x27, 20, 4);: Inisialisasi objek LiquidCrystal_I2C dengan alamat I2C 0x27, dan dimensi LCD 20x4.
pinMode(...): Mengonfigurasi pin yang ditentukan untuk berperilaku sebagai input atau output.myServo1.attach(2);,myServo2.attach(7);,myServo3.attach(13);: Melampirkan servo motor ke pin yang sesuai.lcd.begin();: Memulai LCD.
digitalRead(...): Membaca status pin input digital (HIGH atau LOW).analogRead(...): Membaca nilai dari pin analog yang ditentukan.- Perhitungan nilai persentase
xberdasarkan pembacaan analog dari sensor amonia.
- Tampilan LCD yang berbeda ditetapkan berdasarkan tingkat amonia.
- Jika pembacaan jarak kurang dari 193, servo pertama diatur ke 0 derajat; jika tidak, diatur ke 90 derajat.
- Jika pembacaan suhu lebih dari 52, motor dihidupkan; jika tidak, dimatikan.
- Jika sensor PIR mendeteksi gerakan (HIGH), lampu dihidupkan; jika tidak, dimatikan.
- Jika sensor infrared diaktifkan (HIGH), servo kedua diatur ke 0 derajat; jika tidak, diatur ke 90 derajat.
- Jika sensor sentuhan diaktifkan (HIGH), servo ketiga diatur ke 0 derajat; jika tidak, diatur ke 90 derajat.
1. Rangkaian
e. Download File[Kembali]
- Download HMTL klik di sini
- Download rangkaian Klik di sini
- Download rangkaian Flowchart Klik di sini
- Download kodingan arduino klik di sini
- Download Video Prinsip Kerja Rangkaian klik di sini
- Download penjelasan program klik di sini
- Download Datasheet LED klik disini
- Download Data Sheet Resistor klik disini
- Download Data Sheet Dioda 1N4001 klik disini
- Download Data Sheet Relay klik disini
- Download Data sheet motor servo klik di sini
- Download Data Sheet Motor DC klik disini
- Download Data Sheet Sensor PIR klik disini
- Download Data sheet LM35 Klik di sini
- Download Data Sheet LCD klik di sini
- Download Data Sheet MQ135 klik di sini
- Download Data sheet Touch Sensor klik disini
- Download Data Sheet Sensor Infrared klik disini
- Download Data Sheet Sensor GP2D12 klik disini
- Download File Library Sensor Infrared klik Disini
- Download File Library Sensor PIR klik disini
- Download File Library Touch Sensor klik disini
- Download File Library Sensor MQ135 klik di sini


Tidak ada komentar: